Objective
Humanoid robots need strong electronic assemblies because every movement depends on clean power, stable signals, and reliable control. This blog explains how advanced PCB assembly supports humanoid robot systems, from sensor boards to motor control boards. Blind Buried Circuits helps teams plan PCB builds where assembly quality, inspection, and testing matter before the robot reaches real use.
Key Takeaways
- Humanoid robots use many PCB assemblies across the body.
- Good PCB assembly services reduce failures caused by heat, vibration, and poor soldering.
- Robotic PCB assembly must support motors, sensors, cameras, batteries, and control systems.
- Advanced assembly is important for BGAs, fine-pitch parts, HDI boards, and rigid-flex designs.
- Custom PCB assembly helps when each board has a different electrical and mechanical job.
- Turnkey PCB assembly can keep fabrication, sourcing, assembly, inspection, and testing connected.
Table Of Contents
- Why PCB Assembly Services Matter In Humanoid Robotics
- Where PCB Assemblies Work Inside A Humanoid Robot
- What Makes Robotic PCB Assembly Difficult
- Advanced PCB Assembly For Dense Robot Electronics
- Custom PCB Assembly For Motion, Sensors, And Power
- Turnkey PCB Assembly For Robotics Builds
- Inspection And Testing Before Robot Integration
- Common PCB Assembly Mistakes To Avoid
- FAQs
Why PCB Assembly Services Matter In Humanoid Robotics
A humanoid robot is not one circuit board doing one task. It is a network of boards working together inside a moving machine.
One board may control a joint. Another may process camera data. Another may manage battery power. Other boards may read force, touch, position, or balance sensors.
This makes PCB assembly services important. The assembly must be clean, repeatable, and suited to the board’s real job.
Repeated vibration and mechanical shock can accelerate solder fatigue, especially around heavy components, connectors, and high-mass assemblies. A poor connector choice can loosen during movement. A wrong component value can change sensor readings or power behavior.
For humanoid robotics, assembly quality is not a finishing step. It is part of product reliability. Depending on the application, robotics electronics may also require reliability requirements based on IPC-A-610 acceptance criteria, customer specifications, or industry-specific quality standards.

Where PCB Assemblies Work Inside A Humanoid Robot
A humanoid robot can have PCB assemblies in many areas.
Common examples include:
- Main control boards for processing and decision control
- Motor driver boards for arms, legs, hands, and neck movement
- Battery management boards for charging and protection
- Power distribution boards for voltage control
- Camera boards for vision systems
- Sensor boards for touch, force, angle, and balance feedback
- Communication boards for wired and wireless links
- Rigid-flex boards for tight or moving areas
Each board faces different stress. A board near a motor may face heat and vibration. A board inside a hand may need a small shape and flexible connections. A camera board may need clean signal paths and stable connectors. Connector selection is especially important in robotics because repeated motion, vibration, and cable movement can loosen poorly secured interconnects over time.
Robotic PCB assembly works best when these conditions are known before production starts.
What Makes Robotic PCB Assembly Difficult
Humanoid robots move often. That movement creates stress that a normal desk device may never see.
Motors create vibration. Gearboxes and joints add shock. Walking or gripping can place repeated strain on cables, connectors, and solder joints.
Heat is another concern. Motor drivers, voltage regulators, processors, and battery circuits can run warm. If heat is not managed, components may age faster or behave poorly under load.
Electrical noise also matters. High-current motor switching can introduce conducted and radiated electrical noise that interferes with sensor measurements, communication interfaces, and precision control circuits. Poor grounding or weak shielding can create unstable readings.
Space is tight in many robot sections. Arms, hands, heads, and joints do not leave much room for wide boards or bulky wiring.
These combined mechanical, thermal, electrical, and packaging constraints often require advanced assembly processes and inspection methods to achieve reliable operation. The board may need small parts, fine spacing, controlled soldering, and strong inspection.
Advanced PCB Assembly For Dense Robot Electronics
It is used when a board is too dense or too sensitive for basic assembly methods.
Many robot boards use SMT parts. These small parts save space and support compact layouts. They also need accurate placement and a controlled soldering process.
Processors and memory parts may use BGA packages. A BGA has solder balls under the component. These joints cannot be checked by normal visual inspection. Process control is especially important for BGAs because defective joints are difficult to inspect or rework after system integration.
It can help find opens, shorts, large voids, and poor joint formation.
HDI boards are also common in compact robot electronics. HDI structures can also support improved routing density and shorter interconnect paths, which may benefit signal integrity in compact robotic systems.
They help route signals from dense chips without making the board too large.
Rigid-flex boards can help in moving sections. They reduce cable bulk and can fit inside narrow areas. Bend areas should be protected during assembly and testing because damage to the flex region can reduce long-term bend reliability.
Custom PCB Assembly For Motion, Sensors, And Power
Custom assembly is often needed because robot boards do not all have the same purpose.
A motor control board may include MOSFETs, gate drivers, current sensors, shunt resistors, and power connectors. These parts must be placed and soldered correctly because they handle current and heat.
A sensor board may handle small signals from encoders, IMUs, touch sensors, force sensors, or pressure sensors. Flux residues and contamination can sometimes affect very low-level analog measurements, making cleaning and process control important in sensitive sensor systems.
A battery board must support safe charging, protection, and current flow. Spacing, polarity, solder quality, and inspection are very important on these boards.
A communication board may include Ethernet, CAN, USB, Wi-Fi, Bluetooth, or other links. Electromagnetic compatibility (EMC) should also be considered because motor drives, power electronics, and wireless systems often operate within the same enclosure.
Blind Buried Circuits can review the assembly needs for each board type so the build method matches the function, not just the board size.
Turnkey PCB Assembly For Robotics Builds
Turnkey assembly can help robotics teams avoid scattered handoffs.
In a turnkey process, one build flow can include PCB fabrication, parts sourcing, assembly, inspection, and testing. This is useful when a robot has several board types and many components.
A robotics BOM can include processors, connectors, sensors, power parts, passives, memory, and protection parts. If one part is wrong or unavailable, the board may not work as planned.
This process should include:
- BOM review before parts are ordered
- Footprint and polarity checks
- DFM and DFA review
- Component availability checks
- Approved substitute review with engineering authorization
- Stencil and solder paste planning
- SMT and through-hole assembly
- AOI inspection
- X-ray inspection when needed
- Electrical and functional testing
This process helps teams catch problems before the robot is fully assembled. It also supports faster prototype changes.
Inspection And Testing Before Robot Integration
A robot board should not be judged only by whether it powers on.
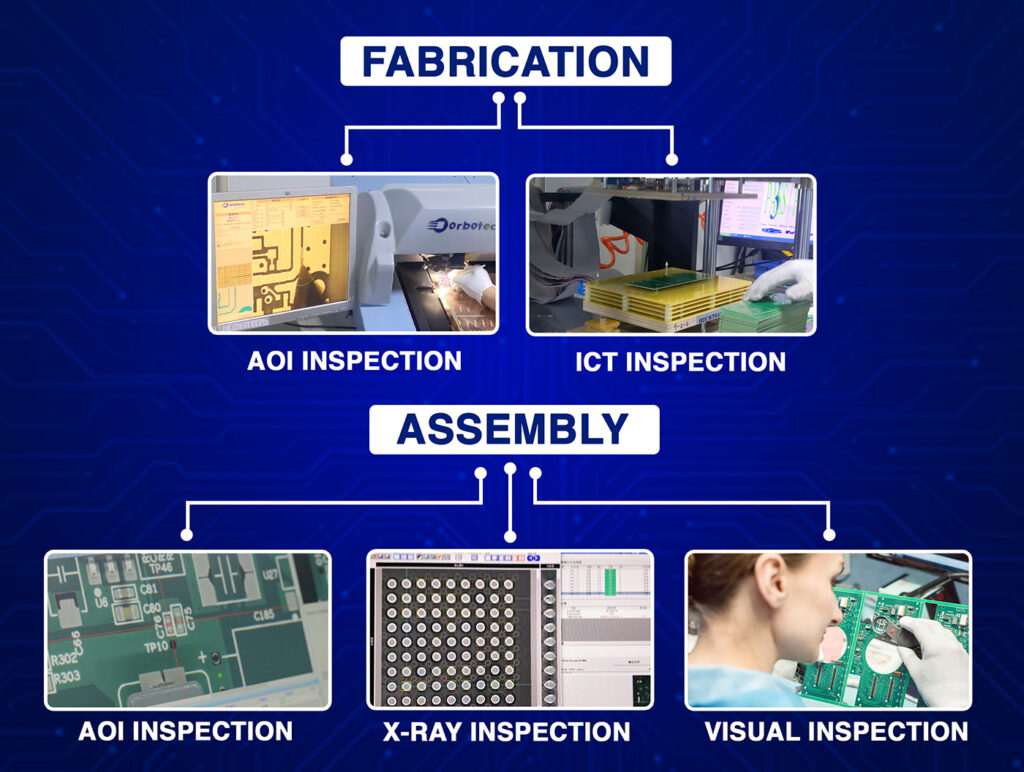
Assembly inspection should start with AOI. AOI can catch missing parts, wrong orientation, solder bridges, tombstoning, and visible solder defects.
X-ray inspection should be used for hidden solder joints, especially under BGA and bottom-terminated packages.
Electrical testing checks basic circuits. Depending on production volume, manufacturers may also use flying-probe testing or in-circuit testing (ICT) to verify assembly quality before functional testing begins.
Functional testing checks whether the board works in its intended role.
Useful robot board tests may include:
- Power rail checks
- Current draw checks
- Firmware programming
- Motor output checks
- Sensor input checks
- Communication checks
- Connector checks
- Load testing
- Thermal validation under expected operating loads can help identify hot spots around processors, power converters, motor drivers, and battery-management circuits.
Test points should be included during PCB design. If test access is missing, troubleshooting becomes slower and more expensive.
For safety-related or high-reliability robot systems, teams may also ask for higher inspection levels, traceability, or process controls based on the product’s risk level. Traceability systems may record component lot codes, manufacturing dates, assembly batches, inspection results, and test records. These records can simplify root-cause analysis if failures occur later in development or field operation.
Common PCB Assembly Mistakes To Avoid
Many assembly problems can be avoided with early review.
Common mistakes include:
- Placing tall parts where vibration is high
- Using weak connectors in moving areas
- Leaving heavy parts unsupported
- Using open via-in-pad without filling
- Ignoring BGA inspection needs
- Skipping thermal review near power parts
- Applying coating over connectors or test points
- Allowing unapproved part substitutions
- Not defining functional tests
- Treating all robot boards as the same type of build
The coating material should be selected based on environmental conditions, serviceability requirements, and compatibility with connectors, sensors, and moving assemblies.
Coating must not cover connector contacts, switches, test pads, or areas that need service.
Underfill is often considered for BGAs and other critical components exposed to vibration, shock, or thermal cycling. These choices should be made before assembly, not after failures appear.
Design For Assembly Considerations
PCB assembly quality begins during design. Component spacing, test-point access, fiducials, panelization strategy, connector orientation, and thermal management decisions can significantly affect manufacturing yield and inspection efficiency.
Conclusion
Humanoid robotics places real stress on electronics. The boards must support motion, sensing, power, communication, and control inside a compact moving system.
Advanced PCB assembly helps when robot boards use dense layouts, small parts, hidden solder joints, HDI structures, or rigid-flex sections. Custom PCB assembly helps match each board to its actual job. Turnkey PCB assembly helps keep sourcing, fabrication, assembly, inspection, and testing in one clear process.
The best time to prevent assembly problems is before the build starts. Blind Buried Circuits helps robotics teams review board files, BOMs, assembly notes, and testing needs before production.
FAQs About PCB Assembly Services For Humanoid Robotics
1. Why Do Humanoid Robots Require Advanced PCB Assembly?
Humanoid robots need advanced PCB assembly because they combine motion control, sensors, AI processing, power management, and communication in compact spaces. The boards must handle heat, vibration, movement, high-density components, and reliable signal transfer.
2. Which PCB Technologies Are Commonly Used In Humanoid Robots?
Common technologies include multilayer PCBs, HDI PCBs, rigid-flex PCBs, flex circuits, embedded computing boards, motor-control PCBs, battery-management boards, and high-speed communication boards. These technologies help support compact packaging, reliable movement, sensor integration, and real-time processing.
3. What Assembly Challenges Are Common In Humanoid Robot Electronics?
Common challenges include BGA soldering, fine-pitch component placement, thermal control, vibration resistance, connector reliability, hidden solder joint defects, and flex circuit stress in moving areas.
4. How Are Robotics Circuit Boards Tested Before Deployment?
Robotics circuit boards are tested through AOI, X-ray inspection, in-circuit testing, flying probe testing, functional testing, firmware validation, thermal checks, and sometimes vibration or burn-in testing.
5. Can Standard PCB Assembly Processes Be Used For Humanoid Robots?
Standard PCB assembly can be used for simple boards, but critical humanoid robot electronics usually need tighter process control, advanced inspection, controlled reflow, traceability, and application-specific testing.
6. Why Is X-Ray Inspection Important For Robotics PCB Assembly?
X-ray inspection checks hidden solder joints under BGAs, QFNs, LGAs, and other leadless packages. It helps detect voids, bridges, opens, misalignment, and solder defects that visual inspection cannot see.
7. What Causes PCB Failures In Humanoid Robots?
Common causes include poor solder joints, cracked vias, overheating, vibration, connector fatigue, moisture, EMI issues, weak flex areas, poor grounding, and insufficient thermal design.
8. How Can Better PCB Assembly Improve Robot Reliability?
Better PCB assembly improves robot reliability by reducing solder defects, improving thermal performance, protecting signal quality, strengthening mechanical durability, and catching faults before the robot is deployed.